

Физический энциклопедический словарь - гироскоп

Гироскоп

Рис. 1. Волчок: АО — его ось; Р — сила тяжести.
Св-ва Г. проявляются при выполнении двух условий: 1) ось вращения Г. должна иметь возможность изменять своё направление в пр-ве; 2) угл. скорость вращения Г. вокруг своей оси должна быть очень велика по сравнению с той угл. скоростью, к-рую будет иметь сама ось при изменении своего направления.
Простейшим Г. явл. детский волчок, быстро вращающийся вокруг своей оси ОА (рис. 1), к-рая может изменять своё положение в пр-ве, поскольку её конец А не закреплён. У Г., применяемых в технике, свободный поворот оси Г. обеспечивают, закрепляя Г. в рамках (кольцах) 1, 2 карданова подвеса (рис. 2), позволяющего оси А В занять любое положение в пр-ве. Такой Г. имеет три степени свободы: он может совершать три независимых поворота вокруг осей АВ, DE и GK,

Рис. 2. Гироскоп в кардановом подвесе. Ротор С, кроме вращения вокруг своей оси АВ, может вместе с рамкой 1 поворачиваться вокруг оси DE u вместе с рамкой 2 — вокруг оси GK; О — центр подвеса, совпадающий с центром тяжести гироскопа.
пересекающихся в центре подвеса О, к-рый остаётся по отношению к основанию неподвижным. Если центр тяжести С Г. совпадает с центром О, то Г. наз. астатическим (уравновешенным), в противном случае — т я ж ё л ы м.
Первое свойство уравновешенного Г. с тремя степенями свободы состоит в том, что его ось стремится устойчиво сохранять в мировом пр-ве приданное ей первоначальное направление. Если эта ось вначале направлена на к.-н. звезду, то при любых перемещениях прибора и случайных толчках она будет продолжать указывать на эту звезду, меняя свою ориентировку относительно осей, связанных с Землёй.
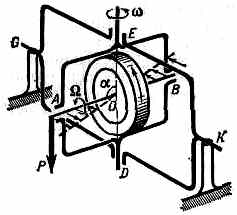
Рис. 3. Действие силы Р на гироскоп с вращающимся ротором; ось АВ движется перпендикулярно направлению силы Р.
Второе свойство Г. обнаруживается, когда на его ось (или рамку) начинает действовать сила (или пара сил), стремящаяся привести ось в движение (т. е. создающая вращающий момент относительно центра подвеса). Под действием силы Р, приложенной к концу А оси АВ (рис. 3), Г. будет отклоняться не в сторону действия силы, как это было бы при невращающемся роторе, а в направлении, перпендикулярном к этой силе;
125
в результате Г. вместе с рамкой начнёт вращаться вокруг оси DE, притом не ускоренно, а с пост. угл. скоростью. Это вращение наз. прецессией; оно происходит тем медленнее, чем быстрее вращается вокруг своей оси АВ сам Г. Если в какой-то момент времени действие силы прекратится, то одновременно прекратится прецессия, и ось АВ остановится.
Величина угл. скорости прецессии определяется по ф-ле:
![]()
где М — момент силы Р относительно центра О, =∟АОЕ, — угл. скорость собств. вращения Г. вокруг оси
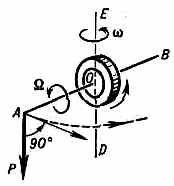
Рис. 4. Правило определения направления прецессии: глядя на ротор из точки приложения силы Р, устанавливаем по ходу или против хода часовой стрелки вращается ротор; повернув силу Р вокруг оси АВ на 90° в ту же сторону, получим направление прецессии.
АВ, I — момент инерции Г. относительно той же оси, h=AO — расстояние от точки приложения силы до центра подвеса Г.; второе равенство имеет место, когда сила Р параллельна оси DE (в частности, для тяжёлого Г.). Из ф-лы (*) непосредственно видно, что прецессия происходит тем медленнее, чем больше , точнее, чем больше величина H=I, наз. собственным кинетич. моментом Г. Как определяется направление прецессии Г., показано на рис. 4.
Наряду с прецессией ось Г. при действии на неё силы может ещё совершать т. н. нутацию — небольшие, но быстрые (обычно незаметные на глаз) колебания оси около её ср. направления. Размахи этих колебаний у быстро вращающегося Г. очень малы и из-за неизбежного наличия сопротивлений быстро затухают. Это позволяет при решении большинства техн. задач пренебречь нутацией и построить т. н. элем. теорию Г., учитывающую только прецессию, скорость к-рой определяется ф-лой (*). Прецессионное движение можно наблюдать у детского волчка (рис. 5, а), для к-рого роль центра подвеса играет точка опоры О. Если ось такого волчка поставить под углом АОЕ к вертикали и отпустить, то она под действием силы тяжести Р будет отклоняться. не в сторону действия этой силы, т. е. не вниз, а в перпендикулярном к ней направлении и прецессировать вокруг вертикали. Прецессия волчка также сопровождается незаметными на глаз нутац. колебаниями, быстро затухающими из-за сопротивления воздуха.
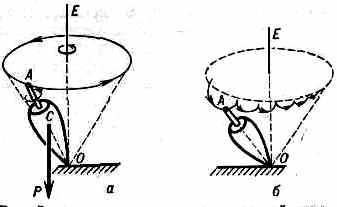
Рис. 5. а — прецессия волчка под действием силы тяжести; б — движение оси волчка при медленном собств. вращении.
Под действием трения о воздух собственное вращение волчка постепенно замедляется, а скорость прецессии со соотв. возрастает. Когда угл. скорость вращения волчка становится меньше определ. величины, он теряет устойчивость и падает. У медленно вращающегося волчка нутац. колебания могут быть довольно заметными и, слагаясь с прецессией, существенно изменить картину движения оси волчка: конец А оси будет описывать ясно видимую волнообразную или петлеобразную кривую, то отклоняясь от вертикали, то приближаясь к ней (рис. 5, б).
Другой пример прецессионного движения даёт артиллерийский снаряд (или пуля). На снаряд при его движении, кроме силы тяжести, действует сила сопротивления (R) воздуха, направленная примерно противоположно скорости центра тяжести снаряда и приложенная выше центра тяжести (рис. 6, а). Невращающийся снаряд под действием этой силы будет кувыркаться, и его полёт станет беспорядочным (рис. 6, б); при этом значительно возрастёт сопротивление движению, уменьшится дальность полёта. Вращающийся же снаряд обладает всеми св-вами Г., и сила сопротивления воздуха вызывает его прецессию вокруг прямой, по к-рой направлена скорость vc (рис. 6, а), т. е. вокруг касательной к траектории центра тяжести снаряда (рис. 6, в); это делает полёт правильным и обеспечивает на нисходящей ветви траектории попадание снаряда в цель головной частью.
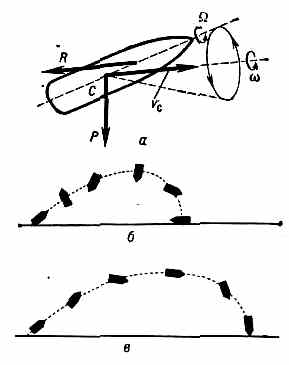
Рис. 6. а — прецессия артиллерийского снаряда; б и в — схемы движения снарядов и их траектории: для невращающегося снаряда (б) и для вращающегося (в).
Наша планета также явл. гигантским Г., совершающим как прецессию, так и нутацию.
Если ось АВ ротора Г. закрепить в одной рамке, к-рая может вращаться по отношению к основанию прибора вокруг оси DE (рис. 7), то Г. будет иметь возможность участвовать только в двух вращениях — вокруг осей А В и DE, т. е. будет иметь две степени свободы. Такой Г. не обладает ни одним из св-в Г. с тремя степенями свободы, однако у него есть другое
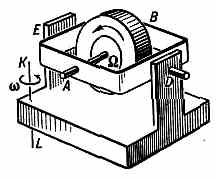
Рис. 7. Гироскоп с двумя степенями свободы.
св-во: если основанию Г. сообщить вынужденное вращение с угл. скоростью со вокруг оси KL, образующей угол а с осью АВ, то со стороны ротора на подшипники А и В начнёт действовать пара сил с моментом Mгир = /Isin. Эта пара сил стремится кратчайшим путём установить ось ротора Г. параллельно оси KL, причём так, чтобы и вращение ротора, и вынужденное вращение были видны происходящими в одну и ту же сторону.
Если ось АВ ротора закреплена в основании D (рис. 8) и это основание неподвижно, то ось не может изменять своё направление в пр-ве, и, следовательно, ротор никакими св-вами Г. не обладает. Однако если вращать основание вокруг нек-рой оси KL с угл. скоростью , то по предыду-
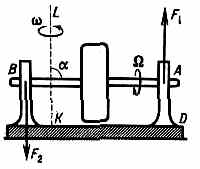
Рис. 8. Действие гироскопич. сил на подшипники, закрепляющие ось, при повороте основания прибора вокруг оси KL.
щему правилу ось ротора будет давить на подшипники А и В с силами F1 и F2, наз. гироскопическими силами.
На морских судах и винтовых самолётах имеется много вращающихся частей: вал двигателя, ротор турбины или динамомашины, гребные или возд. винты и т. п. При разворотах самолёта или судна, а также при качке на подшипники, в которых укреплены эти вращающиеся части, действуют указанные гироскопические силы,
126
и их необходимо учитывать при соответствующих инженерных расчётах.
Теория Г. явл. важнейшим разделом динамики тв. тела, имеющего неподвижную точку. Перечисленные св-ва Г. представляют собой следствия законов, к-рым подчиняется движение такого тела. Первое из св-в Г. с тремя степенями свободы — проявление закона сохранения кинетич. момента, а второе св-во — проявление одной из теорем динамики, согласно к-рой происходящее с течением времени изменение кинетического момента тела равно моменту действующей на него силы.





Вопрос-ответ:


Похожие слова
Самые популярные термины
1 | 1385 | |
2 | 1053 | |
3 | 997 | |
4 | 944 | |
5 | 926 | |
6 | 830 | |
7 | 803 | |
8 | 802 | |
9 | 715 | |
10 | 711 | |
11 | 691 | |
12 | 638 | |
13 | 628 | |
14 | 615 | |
15 | 533 | |
16 | 525 | |
17 | 518 | |
18 | 502 | |
19 | 484 | |
20 | 480 |